Au niveau physique
Introduction
Chez l'Homme, des articulations et des muscles permettent le mouvement. Il serait donc important, semble-t-il, de retrouver le même mécanisme chez l'être humain. Cependant, il y a des choses que l'Homme n'a pas encore réussi à faire, et la copie parfaite d'un membre humain en est l'exemple. C'est dans ce but que nous nous pencherons ci-dessous sur la physique qui régit le fonctionnement de la prothèse. Si les parties du bras ne sont pas les mêmes; quelles sont-elles? Qu'est-ce-qui permet physiquement à la prothèse de bouger? L'Homme peut-il retrouver toutes ses capacités physiques?
Nomenclature
Les prothèses doivent respecter plusieurs points :
- être fabriquées à partir de matériaux résistants, légers, flexibles qui ne soient pas rejetés par le corps de l’individu,
- avoir des batteries légères, autonomes et rapides à recharger,
- des moteurs robustes et peu consommateurs,
- des dizaines de capteurs et de puces capables de capter les signaux provenant des neurones,
- être capable de relier l’ensemble directement sur les terminaisons nerveuses et tout cela bien sûr, sans effets secondaires.
Chez l'Homme
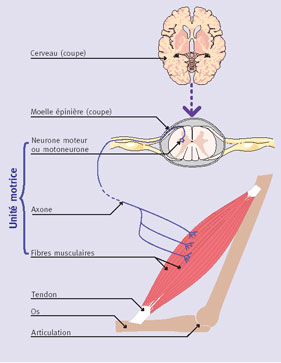
Aux prémices de la contraction d’un muscle, une charge électrique provenant du cerveau se propage le long de la moelle épinière et se dirige vers les muscles par le biais des nerfs. Cet ensemble, composé du réseau neuronal et du groupe musculaire, forment l’unité motrice. Puis, lorsque le signal électrique, appelé plus communément « potentiel d’action », est arrivé au muscle, il déclenche un stimulus qui est suivi par une multitude de réactions chimiques qui engendrent, au final, la contraction musculaire.
Pour la prothèse
Quand un individu veut contracter son muscle, une faible charge électrique haute de 15 microvolts sillonne le muscle et agit comme un interrupteur pour la prothèse. Ces signaux musculaires sont perçus par les systèmes de commande par l’intermédiaire d’électrodes fixées à la surface de la peau. Le signal est ensuite transmis à un micro-ordinateur situé dans l’avant-bras de la prothèse. Ce micro-ordinateur contrôle 6 autres moteurs qui, eux-mêmes, contrôlent le coude, la main et l’épaule.
Les messages nerveux permettent de faire bouger les rotateurs :
- de l’épaule,
- humérale,
- du coude,
- radio-cubital,
- du poignet.
Et enfin, la batterie processeur et la main articulée.
Pour éviter le risque qu’un individu écrase un objet fragile en le tenant dans sa main, le moteur de la pince est commandé par un microprocesseur.
Chaque rotateur possède une fonction propre. En effet :
Le rotateur de l’épaule permet le balancement du bras d’avant en arrière,
Le rotateur de l’épaule permet l’écartement du bras,
Le rotateur huméral, entraine la rotation du coude,
Le rotateur du coude permet d’effectuer la flexion ou l’extension de l’avant-bras,
Le rotateur de l’avant-bras permet d’effectuer les mouvements de supination (Mouvement par lequel on tourne la main du dedans au dehors, de manière que la paume regarde en dessus et que le pouce soit à l'extérieur) et de pronation (Mouvement par lequel on tourne la main du dehors en dedans, de manière que la paume regarde la terre),

Le 1errotateur du poignet permet le déplacement de la main sur le côté,
Le 2e rotateur du poignet permet à la main d’aller d’avant en arrière,
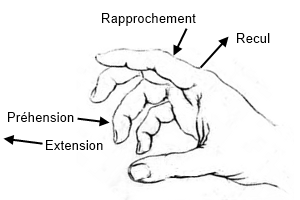
La main, articulée permet le mouvement des doigts indépendant les uns des autres et permet l’opposabilité du pouce par rapport aux autres doigts (toucher l’index avec le pouce, l’annulaire avec le pouce etc) ce qui permet un mouvement simple de préhension.(Mouvement de préhension : saisir un objet)
Degrés de liberté
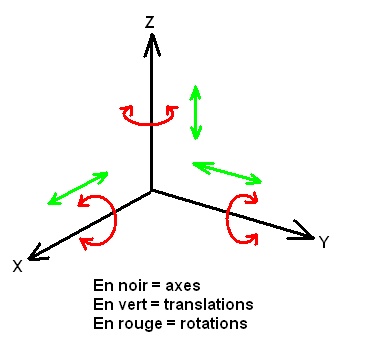
Récemment, un nouveau bras bionique a monté à 22 le nombre de degrés de liberté, cela veut dire que cette prothèse peut effectuer 22 mouvements différents. Ce qui est une révolution puisque que jusque-là, les prothèses n’étaient capables de réaliser que 6 mouvements. En comparaison, l’Homme à un degré de liberté pour le bras égal à 30.
Degrés de liberté = les différentes possibilités de mouvement dans l'espace
Conclusion
La physique utilisée pour la prothèse est mécanique. Par l'utilisation d'electrodes, de micro-processeurs et de moteurs, la prothèse peut executer plusieurs mouvements : mouvement de préhension, de pronation et de supination. Le but de la prothèse bionique est de reproduire de la meilleure manière la dextérité, la force, la sensibilité tactile, le poids et les mouvements d’un membre naturel directement contrôlés par le système nerveux. Cependant, le degré de liberté accordé à la prothèse reste loin de celui de l'Homme. Enfin, tout doit être fait selon des règles. En effet, par exemple, pour le confort de l'utilisateur et le bon fonctionnement de la prothèse, des matériaux légers mais robustes sont nécessaires.


